Created: 2026-03-06 07:59:30
Updated: 2026-03-06 08:16:07
3 PI quantization of a Bose particle
Suppose at t i t_{i} t i x i x_{i} x i x f x_{f} x f t f t_{f} t f
< x f , t f ∣ x i , t i > \begin{equation}
\left<x_{f},t_{f}|x_{i},t_{i}\right>
\end{equation} ⟨ x f , t f ∣ x i , t i ⟩
where the vectors are defined in Heisenberg picture
x ^ ( t i ) ∣ x i , t i ⟩ = x i ∣ x i , t i ⟩ , x ^ ( t f ) ∣ x f , t f ⟩ = x f ∣ x f , t f ⟩ \begin{equation}
\begin{aligned}
\hat{x}(t_{i})\ket{x_{i},t_{i}} = x_{i}\ket{x_{i},t_{i}} , \\
\hat{x}(t_{f}) \ket{x_{f},t_{f}} = x_{f} \ket{x_{f},t_{f}}
\end{aligned}
\end{equation} x ^ ( t i ) ∣ x i , t i ⟩ = x i ∣ x i , t i ⟩ , x ^ ( t f ) ∣ x f , t f ⟩ = x f ∣ x f , t f ⟩
Rewrite the probability amplitude in terms of Schrodinger picture: let x ^ = x ^ ( 0 ) \hat{x}=\hat{x}(0) x ^ = x ^ ( 0 ) x ^ ∣ x ⟩ = x ∣ x ⟩ \hat{x}\ket{x}=x\ket{x} x ^ ∣ x ⟩ = x ∣ x ⟩ x ^ \hat{x} x ^
x ^ ( t i ) = e i H ^ t i x ^ e − i H ^ t i \begin{equation}
\hat{x}(t_{i}) = e^{i \hat{H} t_{i}} \hat{x} e^{-i \hat{H} t_{i}}
\end{equation} x ^ ( t i ) = e i H ^ t i x ^ e − i H ^ t i
is substituted, we have
e i H ^ t i x ^ e − i H ^ t i ∣ x i , t i ⟩ = x i ∣ x i , t i ⟩ x ^ [ e − i H ^ t i ∣ x i , t i ⟩ ] = x i [ e − i H ^ t i ∣ x i , t i ⟩ ] \begin{equation}
\begin{aligned}
e^{i \hat{H}t_{i}}\hat{x} e^{-i \hat{H}t_{i}}\ket{x_{i},t_{i}} & = x_{i}\ket{x_{i},t_{i}}
\\
\hat{x} [e^{-i \hat{H}t_{i}}\ket{x_{i},t_{i}} ] & = x_{i} [e^{-i \hat{H}t_{i}}\ket{x_{i},t_{i}} ]
\end{aligned}
\end{equation} e i H ^ t i x ^ e − i H ^ t i ∣ x i , t i ⟩ x ^ [ e − i H ^ t i ∣ x i , t i ⟩ ] = x i ∣ x i , t i ⟩ = x i [ e − i H ^ t i ∣ x i , t i ⟩ ]
so ∣ x i , t i ⟩ = e i H t i ∣ x i ⟩ \ket{x_{i},t_{i}}=e^{iH t_{i}}\ket{x_{i}} ∣ x i , t i ⟩ = e i H t i ∣ x i ⟩ ∣ x f , t f ⟩ = e i H t f ∣ x f ⟩ \ket{x_{f},t_{f}}= e^{iHt_{f}}\ket{x_{f}} ∣ x f , t f ⟩ = e i H t f ∣ x f ⟩
⟨ x f , t f ∣ x i , t i ⟩ = ⟨ x f ∣ e − i H ^ ( t f − t i ) ∣ x i ⟩ = h ( x f , x i ; i ( t f − t i ) ) \begin{equation}
\bra{x_{f},t_{f}} x_{i},t_{i}\rangle = \bra{x_{f}} e^{-i \hat{H}(t_{f}-t_{i})} \ket{x_{i}} =h(x_{f},x_{i};i(t_{f}-t_{i}))
\end{equation} ⟨ x f , t f ∣ x i , t i ⟩ = ⟨ x f ∣ e − i H ^ ( t f − t i ) ∣ x i ⟩ = h ( x f , x i ; i ( t f − t i ))
define heat kernel of H ^ \hat{H} H ^ h ( x , y ; β ) = ⟨ x ∣ e − H β ∣ y ⟩ h(x,y;\beta)=\bra{x}e^{-H\beta}\ket{y} h ( x , y ; β ) = ⟨ x ∣ e − H β ∣ y ⟩
Suppose Hamiltonian is of the form H = p 2 2 m + V ( x ) H=\frac{p^{2}}{2m}+V(x) H = 2 m p 2 + V ( x )
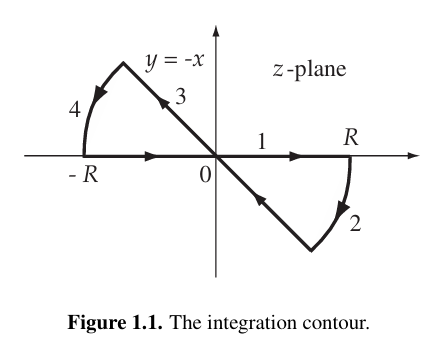
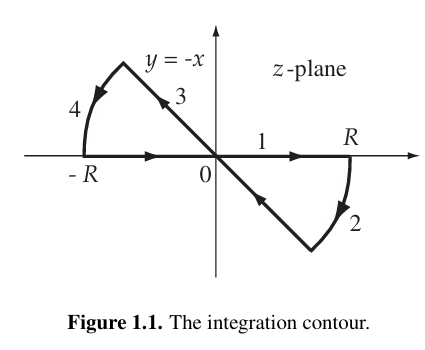
\fcolorbox{pink}{}{Lemma 1.2} a > 0 a>0 a > 0
∫ − ∞ ∞ exp ( − i a p 2 ) d p = π i a \begin{equation}
\int _{-\infty}^{\infty} \exp\left(-iap^{2} \right)\, dp = \sqrt{ \frac{\pi}{ia} }
\end{equation} ∫ − ∞ ∞ exp ( − ia p 2 ) d p = ia π
Note: use the following contour.\fcolorbox{pink}{}{End Lemma}
For any x , y ∈ R x,y\in \mathbb{R} x , y ∈ R
⟨ x ∣ e − i H ϵ ∣ y ⟩ = 1 2 π i ϵ exp [ i ϵ { m 2 ( ( x − y ) ϵ ) 2 − V ( x + y ) 2 } + O ( ϵ 2 ) + O ( ϵ ( x − y ) 2 ) ] \begin{equation}
\bra{x} e^{-iH\epsilon}\ket{y} = \frac{1}{\sqrt{ 2\pi i\epsilon }} \exp\left[i\epsilon\left\{ \frac{m}{2}\left( \frac{\left(x-y\right)}{\epsilon} \right)^{2} - \frac{V(x+y)}{2}\right\} + O(\epsilon ^{2}) + O(\epsilon(x-y)^{2})\right]
\end{equation} ⟨ x ∣ e − i Hϵ ∣ y ⟩ = 2 πi ϵ 1 exp [ i ϵ { 2 m ( ϵ ( x − y ) ) 2 − 2 V ( x + y ) } + O ( ϵ 2 ) + O ( ϵ ( x − y ) 2 ) ]
(Simpler derivation without order consideration):
< x ∣ exp ( − i H ϵ ) ∣ y > = ∫ d k < x ∣ exp ( − i ϵ H ) ∣ k > < k ∣ y > = ∫ d k 2 π e − i k y e i k x e − i ϵ H x \begin{equation}
\left<x|\exp(-iH\epsilon)|y\right> = \int dk \left<x| \exp(-i\epsilon H) |k\right> \left<k|y\right> = \int \frac{dk}{2\pi} e^{-iky}e^{ikx}e^{-i\epsilon H_{x}}
\end{equation} ⟨ x ∣ exp ( − i Hϵ ) ∣ y ⟩ = ∫ d k ⟨ x ∣ exp ( − i ϵH ) ∣ k ⟩ ⟨ k ∣ y ⟩ = ∫ 2 π d k e − ik y e ik x e − i ϵ H x
where H x = k 2 2 m + V ( x ) H_{x} = \frac{k^{2}}{2m} +V(x) H x = 2 m k 2 + V ( x )
− i ϵ k 2 2 m + i k ( x − y ) − i ϵ V ( x ) = − i ϵ 2 m ( k − m ϵ ( x − y ) ) 2 + i 2 ϵ m ( x − y ) 2 − i ϵ V ( x ) \begin{equation}
-\frac{i\epsilon k^{2}}{2m} + ik(x-y) - i\epsilon V(x) = -\frac{i\epsilon}{2m}\left( k- \frac{m}{\epsilon}(x-y) \right)^{2} + \frac{i}{2\epsilon}m(x-y)^{2} - i\epsilon V(x)
\end{equation} − 2 m i ϵ k 2 + ik ( x − y ) − i ϵ V ( x ) = − 2 m i ϵ ( k − ϵ m ( x − y ) ) 2 + 2 ϵ i m ( x − y ) 2 − i ϵ V ( x )
after integration,
L H S = π i ( ϵ / 2 m ) 1 2 π exp [ − i ϵ V ( x ) + i ϵ ( m 2 ( x − y ϵ ) 2 ) ] = m 2 π i ϵ exp [ − i ϵ V ( x ) + i ϵ ( m 2 ( x − y ϵ ) 2 ) ] \begin{equation}
\begin{aligned}
LHS & = \sqrt{ \frac{\pi}{i (\epsilon / 2m)} } \frac{1}{2\pi} \exp \left[ -i\epsilon V(x) + i\epsilon \left( \frac{m}{2}\left( \frac{x-y}{\epsilon}\right)^{2} \right)\right] \\
& = \sqrt{ \frac{m}{2\pi i\epsilon} } \exp \left[ -i\epsilon V(x) + i\epsilon \left( \frac{m}{2}\left( \frac{x-y}{\epsilon}\right)^{2} \right)\right]
\end{aligned}
\end{equation} L H S = i ( ϵ /2 m ) π 2 π 1 exp [ − i ϵ V ( x ) + i ϵ ( 2 m ( ϵ x − y ) 2 ) ] = 2 πi ϵ m exp [ − i ϵ V ( x ) + i ϵ ( 2 m ( ϵ x − y ) 2 ) ]
After repeating,
< x f , t f ∣ x i , t i > = ∫ D x exp [ i ∫ t i t f d t L ( x , x ˙ ) ] , L ( x , x ˙ ) ≡ m 2 x ˙ 2 − V ( x ) \begin{equation}
\left<x_{f},t_{f}|x_{i},t_{i}\right> = \int \mathcal{D}x \exp\left[ i \int _{t_{i}}^{t_{f}} \, dt L(x,\dot{x}) \right] , L(x,\dot{x})\equiv \frac{m}{2}\dot{x}^{2} - V(x)
\end{equation} ⟨ x f , t f ∣ x i , t i ⟩ = ∫ D x exp [ i ∫ t i t f d t L ( x , x ˙ ) ] , L ( x , x ˙ ) ≡ 2 m x ˙ 2 − V ( x )
3 Imaginary time, partition function
Suupose H H H S p e c H = { 0 < E 0 ≤ E 1 ≤ … } \mathrm{Spec} H = \{0<E_{0}\leq E_{1}\leq\dots\} Spec H = { 0 < E 0 ≤ E 1 ≤ … } e − i H t e^{-iHt} e − i H t
e − i H t = ∑ n e − i E n t ∣ n ⟩ ⟨ n ∣ \begin{equation}
e^{-iHt}=\sum_{n} e^{-iE_{n}t} \ket{n} \bra{n}
\end{equation} e − i H t = n ∑ e − i E n t ∣ n ⟩ ⟨ n ∣
and is analytic in lower half-plane of t t t H ∣ n ⟩ = E n ∣ n ⟩ H\ket{n}=E_{n}\ket{n} H ∣ n ⟩ = E n ∣ n ⟩
t = − i τ , τ ∈ R + \begin{equation}
t=-i\tau, \tau\in \mathbb{R}_{+}
\end{equation} t = − i τ , τ ∈ R +
where τ \tau τ t 2 − x ⃗ 2 = − ( τ 2 + x ⃗ 2 ) t^{2}-\vec{x}^{2}= -(\tau ^{2}+\vec{x}^{2}) t 2 − x 2 = − ( τ 2 + x 2 )
x ˙ = d x d t = i d x d τ e − i H t = e − H τ \begin{equation}
\begin{aligned}
\dot{x}= \frac{dx}{dt}=i \frac{dx}{d\tau} \\
e^{-iHt}=e^{-H\tau}
\end{aligned}
\end{equation} x ˙ = d t d x = i d τ d x e − i H t = e − H τ
and thus
< x f , τ f ∣ x i , τ i > = < x f ∣ e − H ( τ f − τ i ) ∣ x i > = ∫ D ˉ x e − ∫ τ i τ f d τ [ ( 1 / 2 m ) ( d x / d τ ) 2 + V ( x ) ] \begin{equation}
\left<x_{f},\tau_{f}|x_{i},\tau_{i}\right> = \left<x_{f}|e^{-H (\tau_{f}-\tau_{i})}|x_{i}\right>= \int \mathcal{\bar{D}}x e^{-\int _{\tau_{i}}^{\tau_{f}} \, d\tau \left[ \left(1/2 m\right) (dx/d\tau)^{2} + V(x)\right]}
\end{equation} ⟨ x f , τ f ∣ x i , τ i ⟩ = ⟨ x f ∣ e − H ( τ f − τ i ) ∣ x i ⟩ = ∫ D ˉ x e − ∫ τ i τ f d τ [ ( 1/2 m ) ( d x / d τ ) 2 + V ( x ) ]
For a given Hamiltonian, the partition function is
Z ( β ) = T r e − β H ( β > 0 ) \begin{equation}
Z(\beta)= \mathrm{Tr} e^{-\beta H}\qquad\left(\beta>0\right)
\end{equation} Z ( β ) = Tr e − β H ( β > 0 )
in eigenvector basis,
Z ( β ) = ∫ d x < x ∣ e − β H ∣ x > = ∫ periodic D ˉ x exp { − ∫ 0 β d τ ( 1 2 m x ˙ 2 + V ( x ) ) } \begin{equation}
Z(\beta) = \int \, dx \left<x | e^{-\beta H}|x\right> = \int _{\text{periodic}} \mathcal{\bar{D}}x \exp \left\{ - \int _{0}^{\beta} \, d\tau \left( \frac{1}{2}m\dot{x}^{2} + V(x) \right)\right\}
\end{equation} Z ( β ) = ∫ d x ⟨ x ∣ e − β H ∣ x ⟩ = ∫ periodic D ˉ x exp { − ∫ 0 β d τ ( 2 1 m x ˙ 2 + V ( x ) ) }
Time ordered product, generating functional
T [ A ( t 1 ) B ( t 2 ) ] = A ( t 1 ) B ( t 2 ) θ ( t 1 − t 2 ) + B ( t 2 ) A ( t 1 ) θ ( t 2 − t 1 ) \begin{equation}
T[A(t_{1})B(t_{2})] = A(t_{1})B(t_{2})\theta(t_{1}-t_{2})+ B(t_{2})A(t_{1})\theta(t_{2}-t_{1})
\end{equation} T [ A ( t 1 ) B ( t 2 )] = A ( t 1 ) B ( t 2 ) θ ( t 1 − t 2 ) + B ( t 2 ) A ( t 1 ) θ ( t 2 − t 1 )
Generalization to more than 3 operators should be trivial. Operators in the bracket are rearranged so that the time parameters decrease from left to right. The n n n n ! n! n ! n − 1 n-1 n − 1
COnsider
< x f , t f ∣ T [ x ^ ( t 1 ) x ^ ( t 2 ) … x ^ ( t n ) ] ∣ x i , t i > , \begin{equation}
\left<x_{f},t_{f}\mid T[\hat{x}(t_{1})\hat{x}(t_{2})\dots \hat{x}(t_{n})]\mid x_{i},t_{i}\right> ,\qquad
\end{equation} ⟨ x f , t f ∣ T [ x ^ ( t 1 ) x ^ ( t 2 ) … x ^ ( t n )] ∣ x i , t i ⟩ ,
Suppose ( t i < t 1 < ⋯ < t n < t f ) (t_{i}<t_{1}<\dots<t_{n}<t_{f}) ( t i < t 1 < ⋯ < t n < t f )
1 = ∫ − ∞ ∞ d x k ∣ x k , t k ⟩ ⟨ x k , t k ∣ \begin{equation}
1= \int _{-\infty}^{\infty} \, dx_{k} \ket{x_{k},t_{k}} \bra{x_{k},t_{k}}
\end{equation} 1 = ∫ − ∞ ∞ d x k ∣ x k , t k ⟩ ⟨ x k , t k ∣
,
< x f , t f ∣ x ^ ( t n ) … x ^ ( t 1 ) ∣ x i , t i > = ∫ d x 1 … d x n x 1 … x n < x f , t f ∣ x n , t n > … < x 1 , t 1 ∣ x i , t i > = ∫ D x x ( t 1 ) … x ( t n ) e i S \begin{equation}
\begin{aligned}
\left<x_{f},t_{f}| \hat{x}(t_{n})\dots \hat{x}(t_{1}) | x_{i},t_{i}\right> & =\int \, dx_{1}\dots dx_{n} x_{1}\dots x_{n} \left<x_{f},t_{f} | x_{n},t_{n}\right> \dots \left<x_{1},t_{1}| x_{i},t_{i}\right> \\
& = \int \mathcal{D}x x(t_{1}) \dots x(t_{n}) e^{iS}
\end{aligned}
\end{equation} ⟨ x f , t f ∣ x ^ ( t n ) … x ^ ( t 1 ) ∣ x i , t i ⟩ = ∫ d x 1 … d x n x 1 … x n ⟨ x f , t f ∣ x n , t n ⟩ … ⟨ x 1 , t 1 ∣ x i , t i ⟩ = ∫ D xx ( t 1 ) … x ( t n ) e i S
in the second equality we expressed each < x k , t k ∣ x k − 1 , t k − 1 > \left<x_{k},t_{k}|x_{k-1},t_{k-1}\right> ⟨ x k , t k ∣ x k − 1 , t k − 1 ⟩ x ^ ( t k ) \hat{x}(t_{k}) x ^ ( t k ) x ( t k ) = x k x(t_{k})=x_{k} x ( t k ) = x k x ( t ) x(t) x ( t )
Define generating functional Z [ J ] Z[J] Z [ J ] T T T J ( t ) J(t) J ( t ) x ( t ) x(t) x ( t )
S [ x ( t ) , J ( t ) ] = ∫ t i t f d t [ 1 2 m x ˙ 2 − V ( x ) + x J ] \begin{equation}
S[x(t),J(t) ] = \int _{t_{i}}^{t_{f}} \, dt \left[ \frac{1}{2}m\dot{x}^{2}-V(x)+xJ\right]
\end{equation} S [ x ( t ) , J ( t )] = ∫ t i t f d t [ 2 1 m x ˙ 2 − V ( x ) + x J ]
The translation amplitude in presence of J ( t ) J(t) J ( t ) ⟨ x f , t f ∣ x i , t i ⟩ \langle x_{f},t_{f}|x_{i},t_{i}\rangle ⟨ x f , t f ∣ x i , t i ⟩
< x f , t f ∣ T [ x ( t n ) … x ( t 1 ) ] ∣ x i , t i > = ( − i ) n δ n δ J ( t 1 ) … δ J ( t n ) ∫ D x e i S [ x ( t ) , J ( t ) ] ∣ J = 0 \begin{equation}
\left<x_{f},t_{f}|T[x(t_{n})\dots x(t_{1})]|x_{i},t_{i}\right> = (-i)^{n} \frac{\delta ^{n}}{\delta J(t_{1})\dots\delta J(t_{n})} \left. \int \, \mathcal{D}x e^{iS[x(t),J(t)]} \right|_{J=0}
\end{equation} ⟨ x f , t f ∣ T [ x ( t n ) … x ( t 1 )] ∣ x i , t i ⟩ = ( − i ) n δ J ( t 1 ) … δ J ( t n ) δ n ∫ D x e i S [ x ( t ) , J ( t )] J = 0
Suppose the system under consideration is in ground state ∣ 0 ⟩ \ket{0} ∣ 0 ⟩ t i t_{i} t i t f t_{f} t f J ( t ) ≠ 0 J(t)\neq 0 J ( t ) = 0 [ a , b ] ⊂ [ t i , t f ] [a,b] \subset [t_{i},t_{f}] [ a , b ] ⊂ [ t i , t f ] J ( t ) J(t) J ( t ) H J = H − x ( t ) J ( t ) H^{J}=H-x(t)J(t) H J = H − x ( t ) J ( t ) U J ( t f , t i ) U^{J}(t_{f},t_{i}) U J ( t f , t i )
< x f , t f ∣ x i , t i > = < x f ∣ U J ( t f , t i ) ∣ x i > = ⟨ x f ∣ e − i H ( t f − b ) U J ( b , a ) e − i H ( a − t i ) ∣ x i ⟩ = ∑ m n ⟨ x f ∣ e − i H ( t f − b ) ∣ m ⟩ ⟨ m ∣ U J ( b , a ) ∣ n ⟩ ⟨ n ∣ e − i H ( a − t i ) ∣ x i ⟩ = e − i E m ( t f − b ) e − i E n ( a − t i ) < x f ∣ m > < n ∣ x i > ⟨ m ∣ U J ( b , a ) ∣ n ⟩ \begin{equation}
\begin{aligned}
\left<x_{f},t_{f}|x_{i},t_{i}\right> & = \left<x_{f}| U^{J}(t_{f},t_{i})|x_i\right> \\
& = \bra{x_{f}} e^{-iH(t_{f}-b)} U^{J}(b,a) e^{-iH(a-t_{i})} \ket{x_{i}} \\
& = \sum_{mn} \bra{x_{f}} e^{-iH(t_{f}-b)}\ket{m} \bra{m} U^{J}(b,a)\ket{n} \bra{n} e^{-iH(a-t_{i})} \ket{x_{i}} \\
& = e^{-iE_{m}(t_{f}-b)}e^{-iE_{n}(a-t_{i}) } \left<x_{f}|m\right> \left<n|x_{i}\right> \bra{m} U^{J}(b,a) \ket{n}
\end{aligned}
\end{equation} ⟨ x f , t f ∣ x i , t i ⟩ = ⟨ x f ∣ U J ( t f , t i ) ∣ x i ⟩ = ⟨ x f ∣ e − i H ( t f − b ) U J ( b , a ) e − i H ( a − t i ) ∣ x i ⟩ = mn ∑ ⟨ x f ∣ e − i H ( t f − b ) ∣ m ⟩ ⟨ m ∣ U J ( b , a ) ∣ n ⟩ ⟨ n ∣ e − i H ( a − t i ) ∣ x i ⟩ = e − i E m ( t f − b ) e − i E n ( a − t i ) ⟨ x f ∣ m ⟩ ⟨ n ∣ x i ⟩ ⟨ m ∣ U J ( b , a ) ∣ n ⟩
where ∣ m ⟩ , ∣ n ⟩ \ket{m},\ket{n} ∣ m ⟩ , ∣ n ⟩ t → − i τ t\to-i\tau t → − i τ e − i E t → e − E τ e^{-iEt}\to e^{-E\tau} e − i Et → e − E τ τ f → ∞ , τ i → − ∞ \tau_{f}\to \infty,\tau_{i}\to-\infty τ f → ∞ , τ i → − ∞ m = n = 0 m=n=0 m = n = 0
lim t f → ∞ , t i → − ∞ < x f , t f ∣ x i , t i > J = < x f ∣ 0 > < 0 ∣ x i > Z [ J ] \begin{equation}
\lim_{ t_{f} \to \infty ,t_{i}\to-\infty} \left<x_{f},t_{f}|x_{i},t_{i}\right>_{J} = \left<x_{f}|0\right> \left<0|x_{i}\right>Z[J]
\end{equation} t f → ∞ , t i → − ∞ lim ⟨ x f , t f ∣ x i , t i ⟩ J = ⟨ x f ∣0 ⟩ ⟨ 0∣ x i ⟩ Z [ J ]
where we have defined generating functional Z [ J ] = ⟨ 0 ∣ U J ( b , a ) ∣ 0 ⟩ = lim t f → ∞ , t i → − ∞ ⟨ 0 ∣ U J ( t f , t i ) ∣ 0 ⟩ Z[J]= \bra{0} U^{J}(b,a) \ket{0} = \lim_{ t_{f} \to \infty, t_{i} \to -\infty } \bra{0}U^{J}(t_{f},t_{i})\ket{0} Z [ J ] = ⟨ 0 ∣ U J ( b , a ) ∣ 0 ⟩ = lim t f → ∞ , t i → − ∞ ⟨ 0 ∣ U J ( t f , t i ) ∣ 0 ⟩
Z [ J ] = lim t f → ∞ , t i → − ∞ < x f , t f ∣ x i , t i > J < x f ∣ 0 > < 0 ∣ x i > \begin{equation}
Z[J] = \lim_{ t_{f} \to \infty ,t_{i}\to-\infty} \frac{\left<x_{f},t_{f}|x_{i},t_{i}\right>_{J}}{\left<x_{f}|0\right> \left<0|x_{i}\right>}
\end{equation} Z [ J ] = t f → ∞ , t i → − ∞ lim ⟨ x f ∣0 ⟩ ⟨ 0∣ x i ⟩ ⟨ x f , t f ∣ x i , t i ⟩ J
The denominator is a constant independent of J J J Z [ J ] Z[J] Z [ J ]
Z [ J ] = N ∫ D x e i S [ x , J ] \begin{equation}
Z[J] = \mathcal{N} \int \mathcal{D}x\ e^{iS[x,J]}
\end{equation} Z [ J ] = N ∫ D x e i S [ x , J ]
where nomalization constant N \mathcal{N} N Z [ 0 ] = 1 Z[0]=1 Z [ 0 ] = 1 Z [ J ] Z[J] Z [ J ] T T T
< 0 ∣ T [ x ( t 1 ) … x ( t n ) ] ∣ 0 > = ( − i ) n δ n δ J ( t 1 ) … δ J ( t n ) Z [ J ] ∣ J = 0 \begin{equation}
\left<0| T[x(t_{1})\dots x(t_n)]|0\right> = (-i)^{n} \frac{\delta ^{n}}{\delta J(t_{1})\dots\delta J(t_{n})}Z[J] |_{J=0}
\end{equation} ⟨ 0∣ T [ x ( t 1 ) … x ( t n )] ∣0 ⟩ = ( − i ) n δ J ( t 1 ) … δ J ( t n ) δ n Z [ J ] ∣ J = 0
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Leave a Comment